그래픽스/SLAM
[SLAM] Hierarchical Pose Graphs for SLAM
jun0823
2022. 7. 31. 23:52
반응형
본 글은
SLAM 한국어 강의
https://www.youtube.com/c/SLAMKR
Cyrill Stachniss 교수님
https://www.youtube.com/playlist?list=PLgnQpQtFTOGQrZ4O5QzbIHgl3b1JHimN_
강의를 듣고 개인적으로 정리한 글입니다.
Hierarchical Approach
Motivation
Back-End에서 graph optimization을 할 때, 실시간으로 정보가 들어오게 되므로, 진행할 수록 로봇의 pose들이 쌓여가므로 Graph가 점점 커지게 된다.
이 경우 optimization을 수행할 때 필요한 연산량이 계속해서 증가하게 되는데, 이는 수행 속도를 느리게 하는 단점을 가지고 있다.
이렇게 해서 생겨난 방법이 Hierarchical Approach이다.
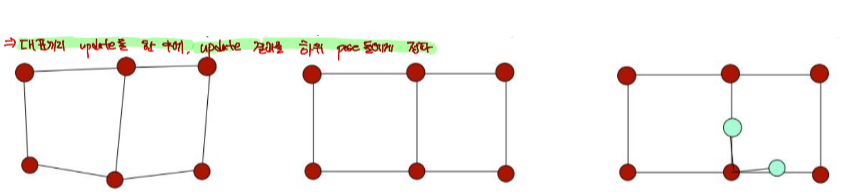
1. 먼저 거리를 기반으로 하여 node들을 grouping한다.
2. 그 후 group 내에서 가장 먼저 관측된 node를 대표로 선택한다.
3. 대표들을 먼저 optimize하고, 해당 결과를 대표에 연결된 다른 node들에 전파한다.

하위노드로 전파되는 과정을 자세히 살펴보게 되면
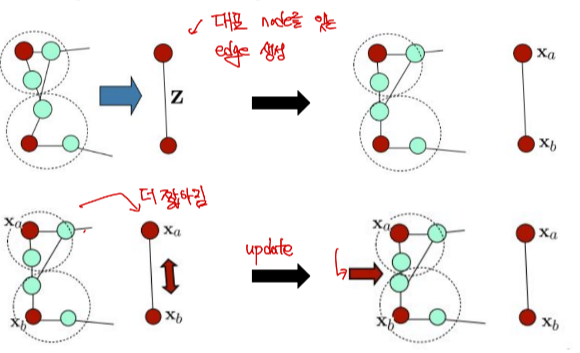
먼저 대표 node를 잇는 edge를 생성하고, 그 edge를 기준으로 원래 있던 edge들을 수정한다.
Conclusion
Grouping하는 과정에서 group간의 update는 독립적으로 간주하기 때문에, group간 연산 시 병렬 처리가 가능하다.
이는 연산 속도를 줄이는 효과를 얻을 수 있다는 장점이 존재한다.
반응형